Planning in AI (Artificial Intelligence) is concerned with the decisions made by intelligent entities such as robots, humans, or computer programs when attempting to accomplish an objective. It entails selecting a series of actions that will (most likely) gradually change the condition of the world to achieve the objective. The universe is usually regarded as a collection of discrete facts (state variables), with actions causing some facts to be true and others to be untrue.
Artificial intelligence (AI) has surfaced as a disruptive force in technology and business, changing how businesses function, engage with their clients, and promote economic expansion. AI apps are becoming increasingly common across businesses and sectors, from chatbots and virtual assistants to predictive analytics and autonomous cars. However, as with any revolutionary technology, AI presents possibilities and challenges, requiring organizations to negotiate complicated and quickly changing data, algorithms, and ethics environments. In this context, planning has evolved as a critical component of AI, assisting businesses to truly understand the transformative power of this game-changing technology while minimizing risk and assuring responsible use.
Planning in AI is fundamentally the process of creating a strategic and organized approach to employing AI systems to accomplish particular aims and objectives. This includes defining the scope and purpose of AI projects, choosing suitable algorithms, data sources, and performance measures, developing and testing models, and monitoring and adapting AI systems over time. While particular planning requirements and approaches may differ based on the business, application, and organizational context, there are several important roles that planning performs in the effective adoption of artificial intelligence.
A plan is a predetermined course of action or collection of guidelines that describes how to accomplish a particular aim or purpose. Plans generally include identifying goals or objectives, developing strategies or tactics to accomplish those goals, and establishing precise actions or steps that must be done to execute the strategies or tactics. Plans can vary in scope and intricacy from simple tasks or to-do lists to comprehensive project plans or long-term strategic plans. A plan's purpose is to serve as a blueprint or framework for decision-making and action-taking, as well as to assist people or groups in achieving their intended results efficiently and effectively.
STRIPS(Stanford Research Institute Problem Solver) is frequently used to represent planning problems in AI. The STRIPS representation was selected to simplify and improve planning algorithms without having it too hard to explain real-world issues. It is composed of:
PDDL(Planning Domain Definition Language) can also be used to illustrate planning problems in AI. PDDL is a generalization of STRIPS
The process of establishing a systematic route for a declaratively defined system to follow to achieve its goals while maximizing total performance measures is known as planning. From a collection of possible transformations, automated planners pick the transformations to implement in a particular condition. In contrast to the classification issue, planners ensure the solution's excellence. Thus, planned activities are regarded as the thinking side of action. In other terms, planning involves deciding the AI system's behaviors and how the system will operate in domain-independent circumstances. Now let us discuss one of the most well-known planning techniques in AI the Block-world.
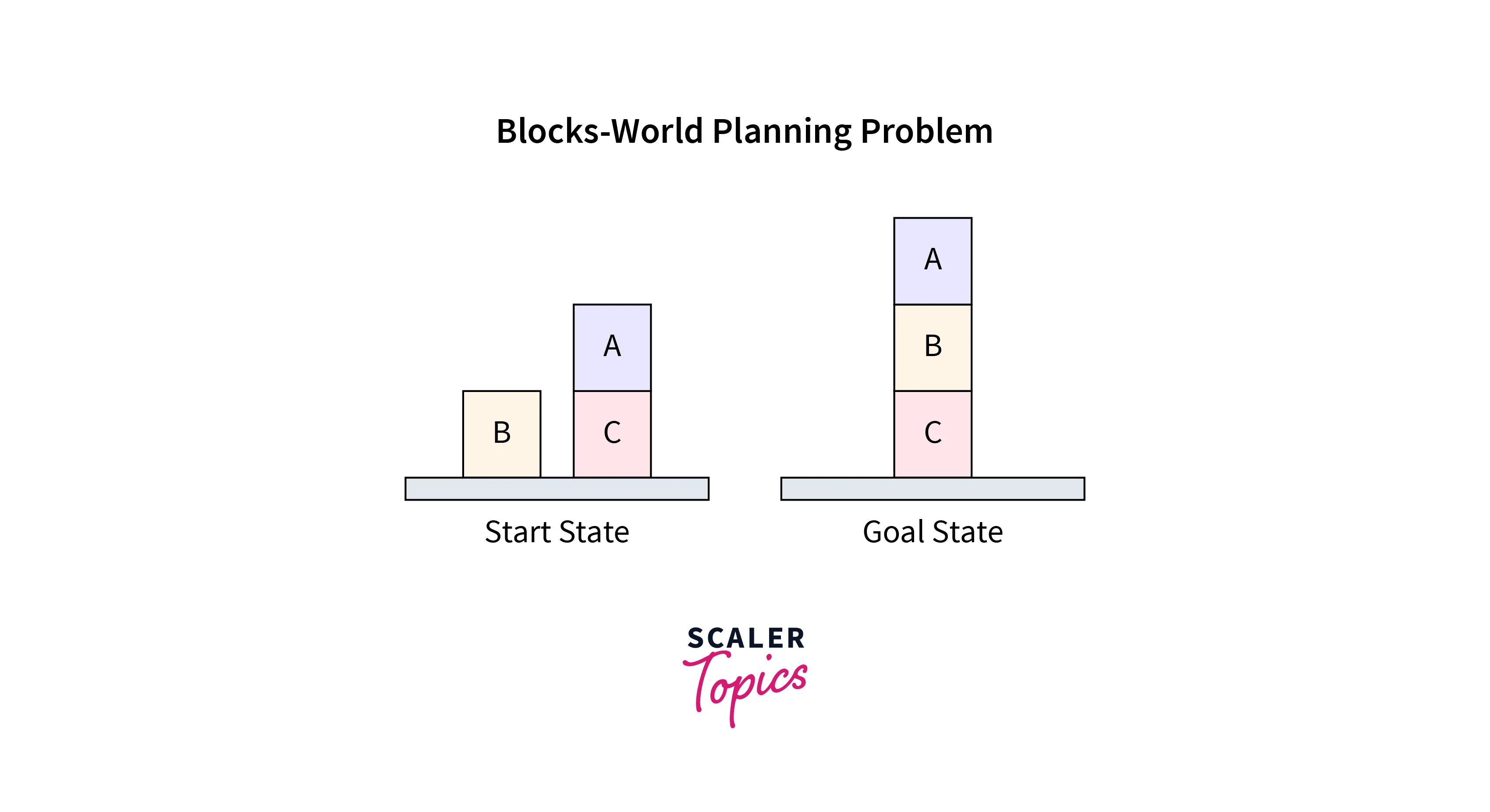
The blocks world is among the most well-known planning techniques in AI. This domain is made up of a collection of cube-shaped pieces arranged on a table (as shown in the figure). Although the blocks can be piled, only one can be placed immediately on top of another. A robot arm can take up a block and transfer it to a different location on the surface or top of another block. Because the arm can only take up one block at a time, it cannot lift a block with another one on it. The objective will always be to construct one or more piles of blocks, which will be described in terms of which blocks are on top of which other blocks.
The planning in AI includes the following crucial steps:
We will now examine what are the different types of planning in AI.
Now we will look at planning techniques in AI. The simplest method is to use a state-space search. The initial state, the set of target states, the set of actions or processes, the set of states, and the path cost comprise the state space. This state space must be searched to discover a sequence of activities that lead to the desired state. Because the specifications of actions in a planning problem describe both preconditions and consequences, it is possible to explore in either way, as shown in Figure below: forward from the starting state or backward from the objective.
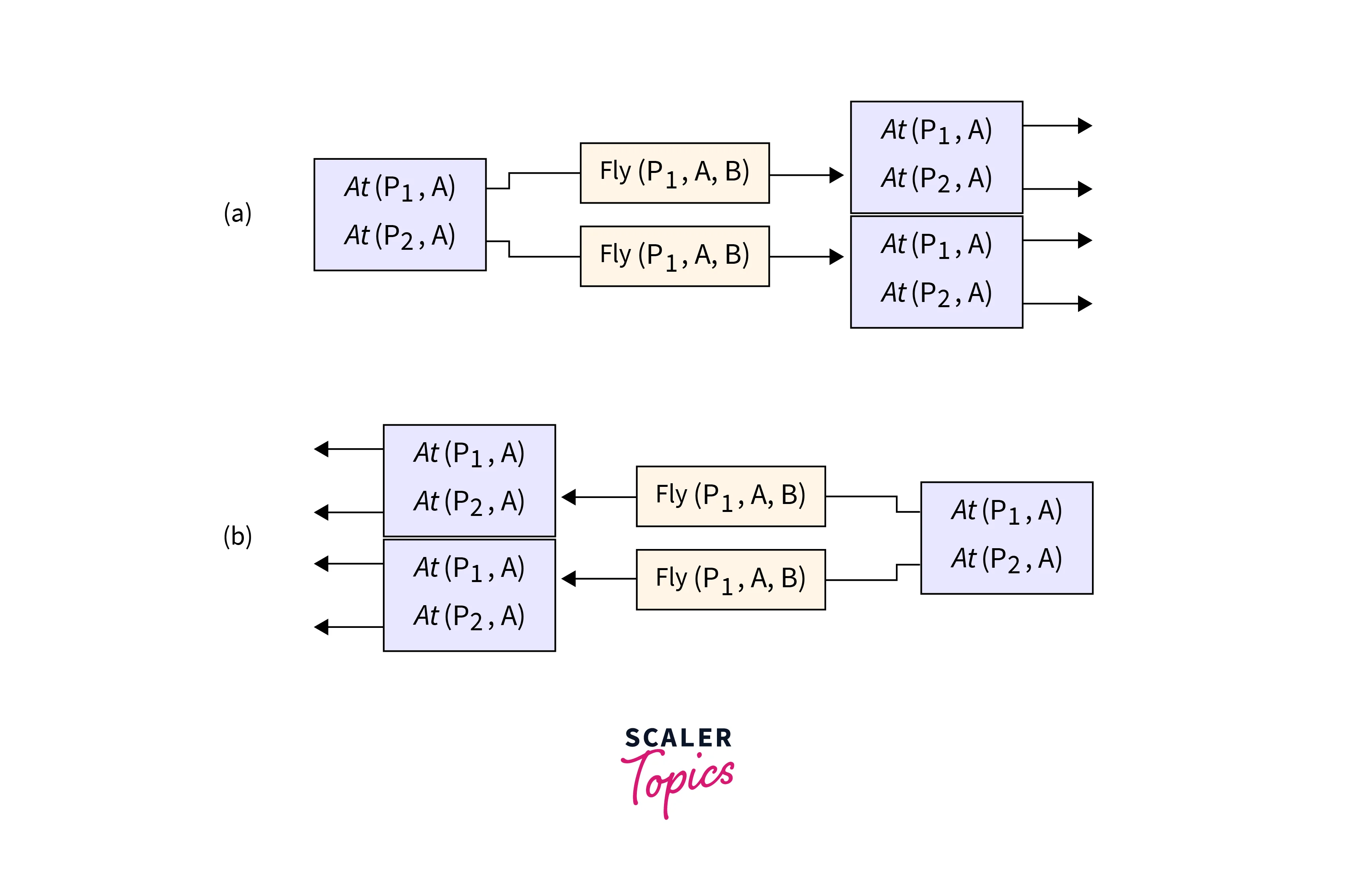
Because it moves in a forward direction, forward state-space search is also known as progression planning. We begin in the problem's initial state and explore action sequences until we discover one that leads to a target state. The following is a description of planning issues as state-space search problems:
FSSS (forward state-space search) begins in the initial state and takes steps to progress to the next state. It then determines whether or not this state is the target condition. If not, it will continue to take other steps until the objective is met.
The algorithm's soundness is one of its advantages.
Extensive branching is a disadvantage.
Backward State Space Planning (BSSP) is analogous to Backward state-space search. This moves us from goal state g to sub-goal g', which determines the prior action needed to achieve that goal. This is known as decline (moving back to the previous goal or sub-goal). The uniformity of these sub-goals needs to be investigated. In this case, the actions must be relevant.
Backward search has the primary benefit of allowing us to examine only pertinent activities, thereby reducing branching.
The algorithm's soundness is one of its disadvantages.
We discussed FSSP and BSSP in the prior section, and each had its advantages and disadvantages. Thus, to build an effective planning system, we should blend the features of FSSP and BSSP, resulting in Goal Stack planning.
Goal Stack planning is among the most important planning methods, which is employed solely by STRIPS. The stack is employed by algorithms to store actions and guarantee that the goal is fulfilled. A knowledge base is employed to keep track of the present status and activities. A goal stack is similar to a component in a search tree, in which branches develop when an action is chosen.
The algorithm's critical stages are as follows:
This planning is employed to create a goal stack and is part of the search space for all potential subgoal orderings. It manages goal interactions using the interleaving technique (The term 'interleaving' indicates 'to alternate'. It is the process of combining, intertwining, and linking our concepts to help us comprehend better and remember additional data when learning).
Non-linear planning may be the best option in terms of plan duration (based on the search technique employed).
This article taught us: